Arduino cu servomotor
Folosind Arduino cu servomotoare, putem controla cu precizie poziția arborelui, deoarece servomotoarele lucrează pe un mecanism de feedback pentru a determina poziția arborelui. Poziția arborelui este măsurată în mod constant cu un potențiometru încorporat în interiorul servomotorului, care o compară cu poziția țintă stabilită de microcontroler (de exemplu, Arduino). Calculând eroarea dintre poziția țintă și poziția actuală, microcontrolerul își ajustează arborele de ieșire pentru a-l potrivi cu poziția țintă. Acest întreg sistem poate fi descris ca a sistem în buclă închisă .
Arduino controlează servomotoarele folosind un semnal PWM. Acest semnal de control este transmis pinului de control al servomotorului. Lățimea semnalului PWM determină poziția arborelui. Tabelul de mai jos oferă o ilustrare a controlului poziției servomotorului folosind semnal PWM
| Lățimea PWM (ms) | Poziția arborelui (unghi) |
|---|---|
| 1 ms | 0˚ grade Min |
| 1,5 ms | 90˚ grade neutru |
| 2 ms | 180˚ grade Max |
Servomotoarele au nevoie, în general, de un impuls PWM la fiecare 20 ms sau 50 Hz. Majoritatea servomotoarelor RC pot funcționa bine într-un interval de la 40 la 200 Hz.
Pini servomotor
Majoritatea servomotoarelor utilizate cu Arduino au trei pini.
- Sol Servomotoarele au un pin GND care în mod normal vine în culoarea neagră.
- Pin de alimentare Este necesar un pin de 5v pentru a da putere servomotorului. Pinul de alimentare este de obicei de culoare roșie.
- Pin de control Mișcarea arborelui servomotor este controlată cu ajutorul știftului de control. Acest pin este conectat la un pin digital Arduino.
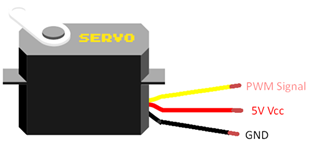
Servomotoarele au diferite scheme de culori disponibile, dar vestea bună este că toate servomotoarele au pini de obicei în aceeași ordine, doar codarea culorilor este diferită.
Servo cu fir cu Arduino
Majoritatea servomotoarelor funcționează la 5V. Pentru a alimenta servo cu Arduino, trebuie să conectăm un pin de 5V al Arduino la pinul de alimentare al servo. Arduino are o gamă limitată pentru atragerea curentului. De obicei, unul sau două motoare pot fi conectate la Arduino. Pentru a controla mai multe servomotoare folosind Arduino, trebuie să le alimentam folosind o sursă externă.
Următoarea configurație a pinului trebuie reținută atunci când alimentați servo:
| Pin servomotor | Pin Arduino |
|---|---|
| Putere (roșu) | Pin 5V sau sursă de alimentare externă |
| Pământ (negru sau maro) | Sursa de alimentare si Arduino GND |
| Pin de control (galben, portocaliu sau alb) | Pinul digital al Arduino |
Pentru a conecta servomotoare cu Arduino, sunt posibile următoarele două configurații:
- Cablă folosind pin Arduino 5V
- Conectați folosind sursa externă cu Arduino
Cablare folosind pin Arduino 5V
Servomotorul poate fi pornit folosind un pin Arduino de 5V, dar un lucru pe care trebuie să-l urmăriți este că Arduino poate da un curent maxim de 500mA servo-ului. Dacă motoarele consumă curent dincolo de această limită, Arduino va reseta automat și s-ar putea să piardă și puterea.
Mai jos este reprezentarea grafică a conexiunii Arduino cu servomotor:
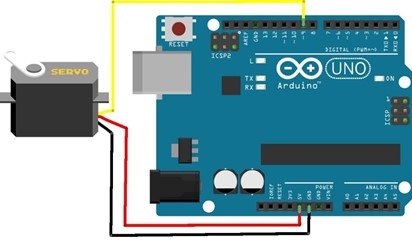
Aici pinul digital 9 Arduino este conectat la pinul de control al servomotorului, în timp ce alimentarea și pinul GND al servo sunt conectate la pinul de 5V și respectiv GND al Arduino.
Cablare folosind sursa externă cu Arduino
Arduino poate furniza curent limitat servomotoarelor, de aceea trebuie să conectăm o sursă de alimentare externă. Folosind o sursă de alimentare separată pentru servomotoare, putem conecta câte motoare vrem cu Arduino, dar țineți cont de pinii digitali disponibili pe plăcile Arduino. Dacă doriți să conectați mai multe servomotoare, atunci este recomandat să utilizați Arduino Mega sau scuturi Arduino care pot oferi mai mulți pini pentru a gestiona toate motoarele.
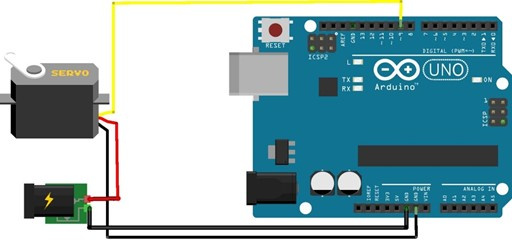
Aici puterea servomotorului și pinul de masă sunt conectați prin pinii de alimentare externi, în timp ce pinul de control este conectat la pinul digital al Arduino, ca în configurația de mai sus.
Concluzie
Servomotoarele sunt o modalitate excelentă de a proiecta proiecte de robotică. Datorită flexibilității lor în ceea ce privește mecanismele de control, utilizatorii Arduino au posibilitatea de a proiecta proiecte la alegere. Un servomotor poate fi conectat la un Arduino folosind puterea și pinii digitali. În timp ce căutați întotdeauna cerințele de energie ale motorului înainte de a-l conecta la Arduino. Pentru a conecta mai multe motoare cu Arduino, trebuie să utilizați o sursă de alimentare externă.